

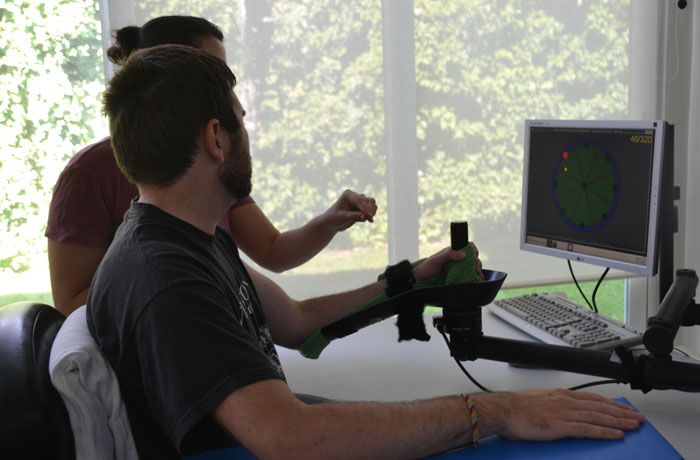
Implementación de la robótica por medio de la Inmotion2 como herramienta complementaria en terapia ocupacional para la rehabilitación del miembro superior tras un DCA. (2014/2015). Objetivo: eficacia del uso de la InMotion2 como herramienta complementaria en la RHB del miembro superior para mejorar rangos y calidad de movimiento de la articulación glehohumeral y codo.


{kind=link}